
PIPELINE CRAWLERS BETATRON PORTABLE X-RAY DIGITAL RADIOGRAPHY
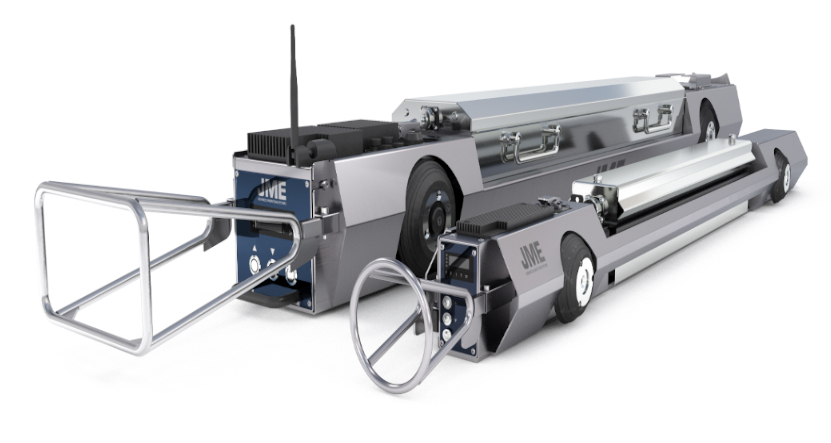
The JME 6:CR2 Pipeline Crawler is specifically designed for non-destructive testing of circumferential butt welds in tubular
installations such as oil and gas transmission pipelines.
Our 2nd Generation CR2 range is the world’s most ‘Technologically Advanced’ NDT crawler system. The JME 6:CR2 Pipeline Crawler is extremely compact and lightweight, deployable in an Internal Diameter (ID) range between 5.5” (140mm) and a maximum of 18” (457mm). Coupled with X-Ray generators from JME or ICM, this system can produce internal panoramic single-wall-single-image (SWSI) radiographs of very high quality.
The crawler can be commanded using JME’s Magnetic Control System (Magnetope), or a conventional isotope control system, additional features are accessible using our brand new CR2 Remote Handset.
Complete set-up of Crawler and X-ray tube parameters
Real-Time status of Crawler while operating in the pipe, includes:
– X-Ray Tube kV / mA
– Exposure Time
– Temperature
– Battery Levels
Remote operation of X-Ray tube for increased safety
Ability to enable/disable key features Including:
– Anti-Runaway
– Water Sensors
– End of Pipe Sensors
– Control System Set-Up
– X-Ray/Gamma Control
ICM SITEX C1802
Pipeline dimensions are dependent on X-Ray Tube
6:CR2 NEW FEATURES
CR2 REMOTE HANDSET
MULTI LANGUAGE TOUCH SCREEN
JME’s unique Handset allows external control and monitoring of the crawler whilst operating in the pipe, providing real time data on the crawler’s activity. It allows the operator to enable/disable all features of the Crawler and X-Ray generator prior to operation, avoiding a lengthy, complex analogue configuration.
CUSTOMISABLE ‘ANTI RUNAWAY’
‘Anti Runaway’ is a system which puts the crawler into reverse if it does not receive a signal from the Magnetope or Handset within a specified time period.
INTEGRATED RADIO RECOVERY
In the event of a malfunction within the pipe, the crawler’s internal logic can be overridden by the handset to reverse the crawler out of the pipe.
AMAX – AUTO MOVE AFTER X-RAY
When AMAX is enabled, the crawler will locate under the Magnetope and be signalled to start the X-Ray. Once the exposure is complete the crawler will automatically drive to the next weld, increasing site efficiency.
END OF PIPE SENSOR KIT / WATER DETECTION SENSOR KIT
End of pipe and water detection sensors are fitted to the front and rear of the crawler. End of pipe sensors detect the Crawler’s proximity to the pipe entrance and stop the system automatically, preventing accidental damage to the equipment. Water detection sensors stop the crawler if water is detected within the pipe. A handset message is displayed in both instances to alert the user.
PROCESSOR CONTROLLED FOR EASY SOFTWARE UPGRADE VARIABLE CRAWLER SPEED CONTROL
LED DISPLAY ON THE REAR OF E-BOX FOR EASIER SETUP
TECHNICAL SPECIFICATIONS
| Pipeline ID/ND diameter range | 5.5” to 18” (140mm to 457mm) |
|---|---|
| Weight (Excluding X-Ray Tube) | 9Ah Battery – 71lbs (32 Kg), 13Ah Battery – 84lbs (38 Kg) |
| Length (Excluding X-Ray Tube) | 1500mm (59″) (including recovery ring) |
| X-Ray tube output options | JME CXT 180, ICM 160CR/1802S |
| Power source | Sealed Lead Acid Batteries 48V (9Ah or 13Ah) |
| Battery capacity | 9Ah / 13Ah Depending on pipe size requirements |
| Travel speed | Up to 12metres (40ft) per minute |
| Maximum angle of climb (Optimum Conditions) | 25° from horizontal |
| Mean positioning accuracy | ±5mm |
| Operating temperature range | -20°C to +70°C |